 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工,電子/電池 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
串聯電路塊的并聯連接指令OLD
兩個或兩個以上的接點串聯連接的電路叫串聯電路塊。串聯電路塊并聯連接時,分支開始用LD、LDN指令,分支結束用OLD指令。OLD指令與后述的ALD指令均為無目標元件指令,而兩條無目標元件指令的步長都為一個程序步。OLD有時也簡稱或塊指令。
2、并聯電路的串聯連接指令ALD
兩個或兩個以上接點并聯電路稱
 |
| 參考價 | 面議 |
更新時間:2022-09-19 17:13:55瀏覽次數:544
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
|
|
 |
西門子CPU模塊6ES7515-2TM01-0AB0參數詳細
西門子PLC程序中常用的幾個指令介紹
1、串聯電路塊的并聯連接指令OLD
兩個或兩個以上的接點串聯連接的電路叫串聯電路塊。串聯電路塊并聯連接時,分支開始用LD、LDN指令,分支結束用OLD指令。OLD指令與后述的ALD指令均為無目標元件指令,而兩條無目標元件指令的步長都為一個程序步。OLD有時也簡稱或塊指令。
2、并聯電路的串聯連接指令ALD
兩個或兩個以上接點并聯電路稱為并聯電路塊,分支電路并聯電路塊與前面電路串聯連接時,使用ALD指令。分支的起點用LD、LDN指令,并聯電路結束后,使用ALD指令與前面電路串聯。ALD指令也簡稱與塊指令,ALD也是無操作目標元件,是一個程序步指令。
3、輸出指令 =
1、= 輸出指令是將繼電器、定時器、計數器等的線圈與梯形圖右邊的母線直接連接,線圈的右邊不允許有觸點,在編程中,觸點以重復使用,且類型和數量不受限制。
4、置位與復位指令S、R
S為置位指令,使動作保持;R為復位指令,使操作保持復位。從的位置開始的N個點的寄存器都被置位或復位,N=1~255如果被復位的是定時器位或計數器位,將清除定時器或計數器的當前值。
5、跳變觸點EU,ED
正跳變觸點檢測到一次正跳變(觸點的入信號由0到1)時,或負跳變觸點檢測到一次負跳變(觸點的入信號由1到0)時,觸點接通到一個掃描周期.正/負跳變的符號為EU和ED,他們沒有操作數,觸點符號中間的"P"和"N"分別表示正跳變和負跳變
6、空操作指令NOP
NOP指令是一條無動作、無目標元件的一個序步指令。空操作指令使該步序為空操作。用NOP指令可替代已寫入指令,可以改變電路。在程序中加入NOP指令,在改動或追加程序時可以減少步序號的改變。
7、程序結束指令END
END是一條無目標元件的一序步指令。PLC反復進行輸入處理、程序運算、輸出處理,在程序的zui后寫入END指令,表示程序結束,直接進行輸出處理。在程序調試過程中,可以按段插入END指令,可以按順序擴大對各程序段動作的檢查。采用END指令將程序劃分為若干段,在確認處于前面電路塊的動作正確無誤之后,依次刪去END指令。要注意的是在執行END指令時,也刷新監視時鐘。
自動升降電梯自動化控制系統的組成
自動升降電梯的工作狀態分為自動狀態和維修工作狀態,這兩種工作狀態互相獨立、彼此分開,目的在于確保控制回路的輸出的*性,避免發生類似雙線圈輸出的情況,杜絕事故的發生。
整個升降電梯自動化控制系統的組成由核心控制元件PLC、空氣開關、電機馬達開關、交流接觸器、觸摸屏、開關、按鈕、指示燈、報警器和外部光電傳感器等元部件組成。其中由面板旋鈕開關或帶鎖的鑰匙旋鈕開關選擇整個系統的工作狀態,通過狀態安全繼電器的得電或失電來區分自動運行和手動運行的輸出電源的通和斷。這樣就使得系統只有在自動運行狀態下時PLC的輸出端子才有輸出電壓,當系統在手動運行狀態下時,PLC輸出端子上無輸出電壓。馬達開關作用為當系統指令電機以工頻方式工作時,起到保護電機的作用。人機界面能夠方便操作人員對設備進行操作和監控,同時實時顯示設備工作狀態,記錄生產產量和班產批次等歷史數據。報警燈由多級柱裝燈塔組成,不同顏色代表不同意義。設備外部設有多個光電傳感器,向PLC傳輸外部狀態信號,指示自動電梯的工作狀態。自動化控制系統中的安全部分的緊急停止按鈕擁有zui高的設備輸出中止權,即無論在手動還是自動狀態下,只要緊停按鈕被按下,設備都會立即停止任何動作。電梯井除了在高處和低處安裝了感應電梯吊籃位置的光電傳感器,還在井架極限高位和極限低位安裝了機械式的行程限位開關,確保電梯轎箱不發生沖頂和撞底的事故。在1樓電梯進口輸送帶和2樓電梯出口輸送帶上分別安裝有1個光電傳感器,用來檢測運輸的產品。在轎箱吊籃內輸送帶上安裝有2個光電傳感器,用來檢測運輸產品的進出情況。
由于生產線的情況決定了在自動升降電梯的自動化控制系統中需要設立主控制柜,和現場分控制箱。在主控制柜內安裝所有空,馬達開關,PLC,觸摸屏,塔式報警燈等元氣件,在現場分控制箱上安裝自動狀態系統停止旋鈕開關。手動檢修操作盒采用移動式手持盒,所有手動按鈕相互連鎖,并且都為點動按鈕
西門子CPU模塊6ES7515-2TM01-0AB0參數詳細
編寫SFC51程序:
CALL "RDSYSST"
REQ :=TRUE
SZL_ID :=W#16#294 //讀取從站是否存在
INDEX :=W#16#1
RET_VAL :=MW0
BUSY :=M2.0
SZL_HEADER:=#length
DR :=P#DB1.DBX0.0 BYTE 500 //結果輸出到DB1數據塊中
在本例中,P#DB1.DBX0.0 BYTE 500中為每個DP從站(16 x 8 = 128)保留一位,地址為Address 1的DP從站的狀態保存在第三個字節的Bit 1位中, 地址為Address 3的DP從站的狀態保存在第三個字節的Bit 3位中,依次類推。如果從站對應的位未被置位,則表明那個DP從站沒有通信上或不存在。
舉例:從DB1.DBW2開始,每個位對應一個bit,例如3號站對應的位是DB1.DBX2.3 ,站點存在的位為1,不存在的為0。
注意事項:
關于系統功能SFC51的更多詳情請參閱STEP 7的在線幫助,或者通過Start > SIMATIC > documentATION選擇手冊“System Software for S7-300/400 System and Standard Functions"
4讀取CPU的序列號
4.1 編程
說明:
通過 SFC 51“RDSYSST"可以從系統狀態列表(SSL)中讀取下列標識數據:
下面的表格指明了可以從不同型號和固件版本的 CPU 讀取其它哪些標識數據。為此使用 SFC 51 和 SSL ID W#16#011C。
表3 INDEX說明
| 索引 | 名稱 | S7-300/C7 | S7-400 |
| W#16#0001 | 自動化系統的名稱 | 從固件版本 V2.2 起 | 支持 |
| W#16#0002 | CPU 的名稱 | 從固件版本 V2.2 起 | 支持 |
| W#16#0003 | CPU 的設備 ID | 從固件版本 V2.2 起 | 支持 |
| W#16#0004 | 版權條目 | 從固件版本 V2.2 起 | 支持 |
| W#16#0005 | CPU 的序列號 | 從固件版本 V2.2 起 | 從 MLFB |
| 6ES741x-xxx04-0AB0 起 | |||
| W#16#0006 | 為操作系統保留 | - | - |
| W#16#0007 | CPU 型號名稱 | - | 支持 |
| W#16#0008 | MMC 或 MC 的序列號 (參見條目號:19215608) | 從固件版本 V2.0 起 | - |
| (CPU317:從 V2.1 開始) |
需要注意,老CPU升級到上表版本也無法實現此功能。
首先需要創建一個數據塊,用來存放讀取出來的狀態結果
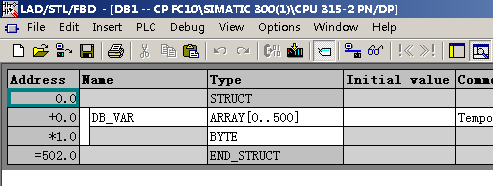
圖7 創建DB1,存放讀取結果
打開OB1,首先在OB1的臨時變量區創建一個變量length,類型設置為Struct(結構)
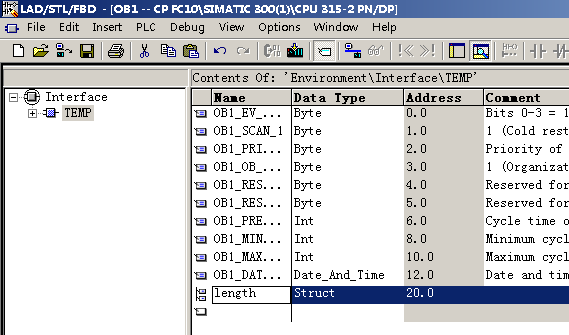
圖8 創建名為length的結構變量
雙擊length變量,進入結構變量成員定義,創建兩個word類型的變量,本例中分別為size和number:
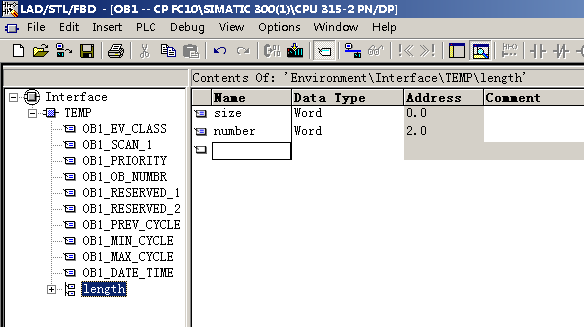
圖9 創建length的結構變量的兩個word成員
 |
 |
 |
 |
 |