 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
脈沖控制器
無反饋兩位控制器
兩位控制器將狀態“ON"和“OFF"作為切換函數。 這與 * 或 0% 輸出相對應。 該特性
會使過程值 x 在設定值 w 周圍持續振蕩。
振幅和波動持續時間隨受控系統的延遲時間 T u 與恢復時間 T g 之間的比例而增加。 這些
控制器主要用于簡單的溫度控制系統(例如直接用電加熱的爐子),或用作限值報警設
 |
| 參考價 | 面議 |
更新時間:2022-07-14 23:58:57瀏覽次數:409
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
|
|
 |
西門子導軌6ES7590-1BC00-0AA0
信號板
CPU 支持擴展信號板,信號板是使用嵌入式的安裝方式的,安裝在CPU的正上方,安裝不會占用空間,比如我們需要擴展少量IO點的時候,就可以選擇擴展數字量IO的信號板。除了數字量IO的信號板,還有模擬量的信號板,這些信號板一般型號是以SB開頭的。此外,還有通信板CB,可以為CPU增加其它通信端口。電池板 BB可提供長期的實時時鐘備份。
S7-200CPU按照以下機制循環工作:
讀取輸入點的狀態到輸入映像區
執行用戶程序,進行邏輯運算,得到輸出信號的新狀態
將輸出信號寫入到輸出映像區
注意:只要CPU處于運行狀態,上述步驟就周而復始地執行。在第二步中,CPU也執行通訊、自檢等工作。
上述三個步驟是S7-200CPU的軟件處理過程,可以認為就是程序掃描時間。實際上,S7-200對數字量的處理速度受到以下幾個因素的限制:
輸入硬件延時(從輸入信號狀態改變的那一刻開始,到CPU刷新輸入映像區時能夠識別其改變的時間)
CPU的內部處理時間,包括:
讀取輸入點的狀態到輸入映像區
執行用戶程序,進行邏輯運算,得到輸出信號的新狀態
將輸出信號寫入到輸出映像區
輸出硬件延時(從輸出緩沖區狀態改變到輸出點真實電平改變的時間)
上述A,B,C三段時間,就是限制西門子PLC處理數字量響應速度的主要因素。
一個實際的系統可能還需要考慮輸入、輸出器件的延時,如輸出點外接的中間繼電器動作時間等。
以上數據都在《S7-200系統手冊》中標明,這里只是列表比較。CPU上的部分輸入點延時(濾波)時間可以在編程軟件Micro/WIN的“系統塊"中設置,其缺省的濾波時間是6.4ms。
如果把容易受到干擾的信號接到CPU上可改變濾波時間的DI點上,調整濾波時間可能改善信號檢測的質量。
不同型號的CPU,IO點數不一樣,選型的時候可以根據實際需要的IO點進行選擇就可以了。此外,每個CPU都自帶有兩路模擬量輸入信號,對于1215C、1215FC、1217C還支持兩路模擬量輸出信號。
3、擴展能力
每個CPU都可支持在左側擴展最多3個通信模塊,在CPU正上方擴展一個信號板。但是并不是每個CPU都能支持在右側擴展最多到8個模塊的。比如CPU1211C不支持信號模塊的擴展,CPU1212C和CPU1212FC最多只可擴展2個模塊,其他CPU最多可擴展8個模塊。
4、高速計數功能和高速脈沖輸出能力
CPU1211C最多支持3個高速計數器,CPU1212C最多支持5個,其余CPU可以支持6個高速計數器。S7-1200系列 PLC可以支持4個高速脈沖輸出,本體最高可支持100KHz的高速脈沖輸出,擴展信號板可支持200KHz的高速脈沖輸出,而CPU1217C可支持的最多1MHz的高速脈沖輸出。
5、PROFINET接口
除CPU1215C/1215FC、CPU1217C自帶兩個PROFINET接口外,其余CPU自帶一個PROFINET接口。
6、運算速度
S7-1200系列PLC比S7-200系列PLC具有更快的運算速度,執行一條布爾運算指令只需要0.08微妙的時間,執行一條實時運算指令只需要2.3微妙的時間
執行器分為以下幾種:
● 帶有恒定起動信號的比例執行器
這些元件用于設置開啟角度、角位置,或與輸出值成比例的位置。輸出值在控制范圍
內會對過程產生模擬量作用。
此組中的執行器包括彈簧支撐的氣動驅動器,以及構成位置控制系統的帶位置反饋的
電動驅動器。
PT1 受控系統
在 PT1 受控系統中,過程值的變化初與輸出值的變化成比例。 過程值的變化率隨時間
減小,直至達到終值,即被延遲。
示例:
● 彈簧減震系統
● RC 元件的充電
● 由蒸汽加熱的貯水器。
加熱與制冷過程,或充電和放電特性的時間常量通常相同。 時間常量不同時,控制顯然
會更加復雜。
PT2 受控系統
在 PT2 受控系統中,過程值不會立即跟隨輸出值的階躍變化,即,過程值的增加與正向
上升率成正比,然后隨著上升率的下降而逼近設定值。 受控系統通過二階延遲元件顯示
比例響應特性。
示例:
● 壓力控制
● 流速控制
● 溫度控制
非自調節受控系統
非自調節受控系統具有積分響應。 過程值趨于無限大的值。
脈沖控制器
無反饋兩位控制器
兩位控制器將狀態“ON"和“OFF"作為切換函數。 這與 * 或 0% 輸出相對應。 該特性
會使過程值 x 在設定值 w 周圍持續振蕩。
振幅和波動持續時間隨受控系統的延遲時間 T u 與恢復時間 T g 之間的比例而增加。 這些
控制器主要用于簡單的溫度控制系統(例如直接用電加熱的爐子),或用作限值報警設
有反饋兩位控制器
在受控系統具有較長延遲時間的情況下(例如功能空間與加熱空間分離的爐),可通過使
用電力反饋改善兩位控制器的特性。
反饋用于增加控制器的開關頻率,但這會減小過程值的振幅。 此外,在動態操作中可充
分改進控制作用結果。 切換頻率限制由輸出級別決定。 在機械起動器(例如繼電器和觸
點)上,每分鐘不得超過 1 到 5 次切換。 如果是下游可控硅或三端雙向可控硅控制器的
電壓和電流輸出,則可選擇超過受控系統目前限制頻率的高切換頻率。
因為切換脈沖無法再通過受控系統的輸出來確定,所以會得到與連續控制器結果類似的結
果。
通過對連續控制器的輸出值進行脈寬調制來生成輸出值
西門子導軌6ES7590-1BC00-0AA0
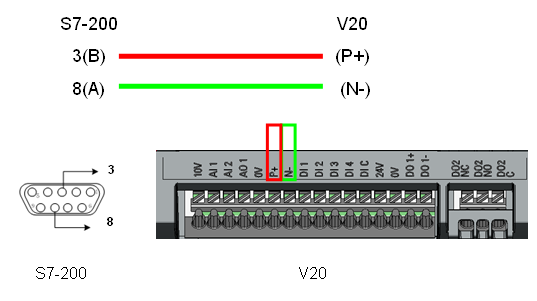
用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規則:V20的
P+對3、N-對8),如下圖所示:
3.4 變頻器參數設置:
V20 可以通過選擇連接宏Cn010實現USS控制,也可以通過直接更改變頻器參數的方法來實現。參數設置如下表所示:
表一:
| 參數 | 描述 | Cn010默認值 | 實際設置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設定值 |
| P2023 | RS485協議選擇 | 1 | 1 | USS協議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字數 |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字數可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數據時間 |
3.5 使用USS協議的初始化模塊初始化S7-200的PORT0端口:
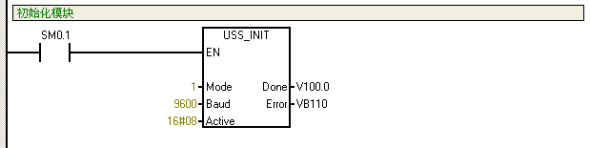
EN使能:每次改變通訊狀態都應該執行一次初始化指令。所以EN信號應該通過邊沿檢測元件脈沖激活。
Mode:用這個USS輸入值選擇通訊協議。
1:為端口0USS協議,并啟用該協議。
0:為端口0PPI協議,并禁止USS協議。
Baud: 波特率:9600,19200…115200。
Active:激活驅動地址。
Done:當USS_INIT 指令執行完成后,Done=1。
Error:指令執行的結果,如果有錯誤,顯示錯誤代碼。
Active:激活驅動地址舉例:

3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,為了運行變頻器需要按照表一設置參數:

狀態表:

 |
 |
 |
 |
 |