 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工,電子/電池,電氣 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
功能
從系統收集診斷信息和系統信息
以ZIP格式歸檔收集的信息,按不同系統歸類
通過組態工具(Settings Manager)收集特定系統組態的數據信息
設置保存到組態文件中
優點
可以快速收集大量診斷信息和系統信息
收集只需一次“點擊“。這樣就省去了耗時的對每個系統的診斷信息和系統信息的手動收集
 |
| 參考價 | ¥666 |
| 訂貨量 | 1臺 |
更新時間:2022-12-19 18:00:39瀏覽次數:461
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
|
|
6ES7317-2AK14-0AB0參數詳細
1 現象描述
在許多項目中,經常會使用DP/DP Coupler來實現2個DP主站之間的DP網絡通信,而且2個DP主站也是由兩方合作一起完成數據交換。


DPDPCoupler.rar (795,1 KB)
但是,該通信方式是需要雙方合作才能完成實現的,只要有一方通信設置出現問題,就無法完成2個DP網絡之間的正常通信,同時還無法判斷由哪方來承擔該通信方式出錯的責任。
鑒于這種現象,本文檔設計了一個方法,可以自己測試自己的DP/DP Coupler的DP網絡是否設置正確。
2 測試方法 2.1 組態設置
都知道DP/DP Coupler用來實現2個 DP網絡之間的通信,在合作雙方的實際情況中,任何一方的DP主站系統中,DP網絡都只是下掛1個DP/DP Coupler。如下圖所示。

圖2-1
而本文檔設計的方法,就是借用合作方的使用的DP/DP Coupler的DP接口,即將DP/DP Coupler的2個DP接口都納入到自己的DP系統網絡中。如下圖所示。

圖2-2
那么,在自己的DP網絡系統繼續添加一個相同的DP/DP Coupler,即本DP網絡下掛2個DP/DP Coupler,DP地址就是DP/DP Coupler模塊播碼的地址。如下圖所示。

圖2-3
如圖2-3所示,分別點擊7號和8號,為兩個站分配相應的I/O傳輸地址。需要注意:7號站首行是輸入32個字節,那么8號站首行必須是對應輸出32個字節;7號站第二行是輸出32個字節,那么8號站第二行必須是對應輸入32個字節。

圖2-4
將測試組態好的項目,下載到CPU中。
2.2 通信測試
在項目中新建2個變量表,分別取名7號站和8號站,如下圖所示。

圖2-5
在7號站變量表中,新建10個輸入(IB0-IB9)和10個輸入(QB0-QB10),在8號站變量表中,新建10個輸入(IB32-IB41)和10個輸入(QB32-QB41)。如下圖所示。

圖2-6
給QB0-QB10分別賦值B#16#01——B#16#10,給QB32-QB41分別賦值B#16#11——B#16#20。如下圖所示。可以看到,7號站和8號站,分別接收到對方發生過來的數據。

圖2-7
如果這種測試可以成功,表示自己項目的DP/DP Coupler的配置就是正確的
6ES7317-2AK14-0AB0參數詳細
SIMATIC Assessment Suite - Data Collector (SAS-DC)-原名為SIMATIC Diagnostics Tool (SDT)-可以幫助用戶簡單而又容易地從計算機或其它設備收集診斷信息和系統信息。
可以從本地系統或者網絡中的系統收集診斷信息和系統信息。 這些診斷信息和系統信息存儲在系統特定的歸檔里。
功能
從系統收集診斷信息和系統信息
以ZIP格式歸檔收集的信息,按不同系統歸類
通過組態工具(Settings Manager)收集特定系統組態的數據信息
設置保存到組態文件中
優點
可以快速收集大量診斷信息和系統信息
收集只需一次"點擊"。這樣就省去了耗時的對每個系統的診斷信息和系統信息的手動收集
無需安裝
配置可以保存并再次使用
配置可以轉發
運行這個工具后,所有已組態系統的診斷信息和系統信息可以在一臺計算機上集中獲取
系統要求
可以運行在標準Windows操作系統上
數據收集
從本頁下載"SDT2016_1.zip" 文件到你的系統并解壓到你選擇的文件夾,比如,"D:\Diagnose"。
| 從本地系統的數據收集 | 通過網絡的多系統收集數據 |
啟動工具。 點擊"Start Collecting"。 一個歸檔文件會創建在子目錄下。
| 啟動工具并進入Settings Manager。 為系統創建配置文件并組態。 保存配置。 進入"Collector"選項卡并點擊"Start Collecting"。 會在子目錄下給每個配置文件創建一個歸檔文件。
|
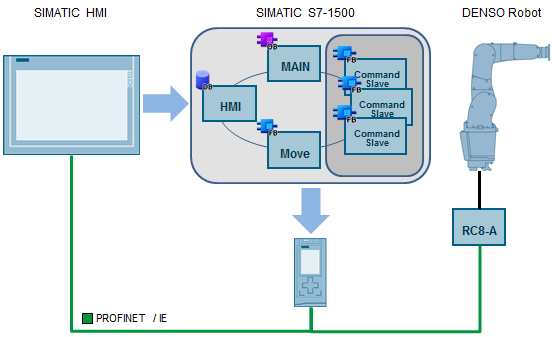
圖. 01
PLC 程序通過 "Command Slave" 功能包提供的功能庫對機器人進行控制。這些功能塊遵循類似于 PLCopen 的標準,與 SIMATIC CPU 集成的運動控制功能相似。機器人可以通過庫里的功能塊進行啟動和監控,并執行基本的運動指令,如點到點運動、直線或圓周運動等。
機器人受機器人控制器控制, "Command Slave" 功能包包含一個命令注釋器并安裝在機器人控制器上,用于將PLC程序命令傳送給機器人。這就確保 RC8-A 機器人控制器的所有運動功能和相關的安全功能為可用狀態,并且機器人可以獨立于 SIMATIC CPU 負荷執行一般精度的運動功能。
"Command Slave" 功能包在所有裝有 RC8-A 控制器的機器人上都可使用。

圖. 02
當機器人運動是面向事件的并且適用于要執行的任務時,該功能包非常適用于各種手臂應用和簡單的輪廓線運動。
使用該功能包有如下優點:
所有功能組件,如 SIMATIC 控制器和機器人控制器都通過 PROFINET 連接。
機器人集成在 TIA 博途環境中。
機器人在工廠標準中的簡單集成,包括安全功能。
通過一臺 HMI 可以對整個工廠的所有機器人進行靈活的和故障安全的操作。
電裝機器人歐洲公司提供的功能包適用于 STEP7(TIA博途)環境下的 SIMATIC S7-1500 控制器。控制器對于每臺機器人均可以使用至少 256 字節的地址空間。