您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工,電子/電池,電氣 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
使用編碼器和高速計數器,定時中斷等,可以進行旋轉體的速度周期等數據的測量,此功能在對電機測量方面有廣泛的應用。
實數的格式
實數(浮點數)由32位單精度數表示,其格式按照ANSI/IEEE754-1985標準中所描述的形式。實數按照雙字長度來存取。對于S7-200來說,浮點數精確到小數點后第六位。因而當使用一個浮點數常數時
 |
| 參考價 | ¥670 |
| 訂貨量 | 1 臺 |
更新時間:2022-10-25 22:17:17瀏覽次數:328
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
|
 |
西門子模塊6ES7212-1BE40-0XB0
S7-200是一款通用性很強大的產品,直接提供的功能有限,但是可以不斷的思考,通過編程等方式獲得產品更大的利用空間。
西門子S7-200PLC的自由口通訊具有非常強大的功能,熟練使用自由口通訊可以很方便的實現PLC與其他智能設備的數據交換。使用自由口通訊需要以下幾個方面的編程設置:對SMB30進行設置端口選擇,波特率選擇,校驗設置,對SMB87,89,90,94進行設置緩沖區等。通過ATCH指令進行中斷設置,對中斷狀態進行判斷。通過RCV指令進行接收數據。
通訊交換數據
交換數據是通過COM口進行的,所以一定要注意通訊口的地址使用和時間使用。另外數據緩沖區定義也非常重要,因為交換的數據會直接存儲到這個緩沖區里。
與其他智能設備通訊
S7-200與其他智能設備通訊時,一般會采用相應的協議,一般來說一個網絡會有相應的站地址,以及主站與從站,一定要區分好這方面的問題。
PID控制器的參數整定是控制系統設計的核心內容。它是根據被控過程的特性確定PID控制器的比例系數、積分時間和微分時間的大小。
PID控制器參數整定的方法很多,概括起來有兩大類:一是理論計算整定法。它主要是依據系統的數學模型,經過理論計算確定控制器參數。二是工程整定方法,它主要依賴工程經驗,直接在控制系統的試驗中進行,且方法簡單、易于掌握,在工程實際中被廣泛采用。
PID控制器參數的工程整定方法,一般采用的是臨界比例法。利用該方法進行PID控制器參數的整定步驟如下:(1)首先預選擇一個足夠短的采樣周期讓系統工作;(2)僅加入比例控制環節,直到系統對輸入的階躍響應出現臨界振蕩,記下這時的比例放大系數和臨界振蕩周期;(3)在一定的控制度下通過公式計算得到PID控制器的參數。
PID參數的設定:是靠經驗及工藝的熟悉,參考測量值跟蹤與設定值曲線,從而調整PID的大小。比例I/微分D=2,具體值可根據儀表定,再調整比例帶P,P過頭,到達穩定的時間長,P太短,會震蕩,永遠也打不到設定要求。
PID控制器參數的工程整定,各種調節系統中P.I.D參數經驗數據以下可參照:
溫度T:P=20~60%,T=180~600s,D=3-180s;
壓力P:P=30~70%,T=24~180s;
液位L:P=20~80%,T=60~300s;
流量L:P=40~100%,T=6~60s。
這里介紹一種經驗法,方法的基本程序是先根據運行經驗,確定一組調節器參數,并將系統投入閉環運行,然后人為地加入階躍擾動(如改變調節器的給定值),觀察被調量或調節器輸出的階躍響應曲線。若認為控制質量不滿意,則根據各整定參數對控制過程的影響改變調節器參數。這樣反復試驗,直到滿意為止。
西門子S7-200PLC集成有高速計數功能,高速計數是PLC的一項非常重要的功能,在工業領域中測量轉動速度與周期一般都是用脈沖式儀器,例如旋轉編碼器。這類儀器的頻率遠遠大于PLC的采集頻率,因此使用高速計數器顯得尤為重要。S7-200高速計數功能的知識點主要分幾個部分:一是輸入地址,二是計數模式,按有無方向,有無復位,外部復位和軟復位等進行分類。三是相應的控制特殊功能寄存器。來控制計數器的模式和預置值等。
高速計數器復位
高速計數的復位是使用計數器時非常重要的地方。由于外部器件例如編碼器等,一般都會有累積誤差,那么就需要定期的進行復位。另外編碼器一些功能的實現也要求它具有復位功能。
高速計數器測量轉速周期等
7.3.2 PLC 軟件系統設計的步驟
在了解了程序結構和編程方法的基礎上,就要實際地編寫 PLC 程序了。編寫 PLC 程序和編寫其他計算機程序一樣,都需要經歷如下過程。
1. 對系統任務分塊
分塊的目的就是把一個復雜的工程,分解成多個比較簡單的小任務。這樣就把一個復雜的大問題化為多個簡單的小問題。這樣可便于編制程序。
2. 編制控制系統的邏輯關系圖
從邏輯關系圖上,可以反應出某一邏輯關系的結果是什么,這一結果又英國導出哪些動作。這個邏輯關系可以是以各個控制活動順序為基準,也可能是以整個活動的時間節拍為基準。邏輯關系圖反映了控制過程中控制作用與被控對象的活動,也反應了輸入與輸出的關系。
3. 繪制各種電路圖
繪制各種電路的目的,是把系統的輸入輸出所設計的地址和名稱聯系起來。這是很關鍵的一步。在繪制 PLC 的輸入電路時,不僅要考慮到信號的連接點是否與命名一致,還要考慮到輸入端的電壓和電流是否合適,也要考慮到在特殊條件下運行的可靠性與穩定條件等問題。特別要考慮到能否把高壓引導到 PLC 的輸入端,把高壓引入 PLC 輸入端,會對 PLC 造成比較大的傷害。在繪制 PLC 的輸出電路時,不僅要考慮到輸出信號的連接點是否與命名一致,還要考慮到 PLC 輸出模塊的帶負載能力和耐電壓能力。此外,還要考慮到電源的輸出功率和極性問題。在整個電路的繪制中,還要考慮設計的原則努力提高其穩定性和可靠性。雖然用 PLC 進行控制方便、靈活。但是在電路的設計上仍然需要謹慎、全面。因此,在繪制電路圖時要考慮周全,何處該裝按鈕,何處該裝開關,都要一絲不茍。
4. 編制 PLC 程序并進行模擬調試
在繪制完電路圖之后,就可以著手編制 PLC 程序了。當然可以用上述方法編程。在編程時,除了要注意程序要正確、可靠之外,還要考慮程序要簡捷、省時、便于閱讀、便于修改。編好一個程序塊要進行模擬實驗,這樣便于查找問題,便于及時修改,不要整個程序完成后一起算總帳。
5. 制作控制臺與控制柜
在繪制完電器、編完程序之后,就可以制作控制臺和控制柜了。在時間緊張的時候,這項工作也可以和編制程序并列進行。在制作控制臺和控制柜的時候要注意選擇開關、按鈕、繼電器等器件的質量,規格必須滿足要求。設備的安裝必須注意安全、可靠。比如說屏蔽問題、接地問題、高壓隔離等問題必須妥善處理。
6. 現場調試
現場調試是整個控制系統完成的重要環節。任何程序的設計很難說不經過現場調試就能使用的。只有通過現場調試才能發現控制回路和控制程序不能滿足系統要求之處;只有通過現場調試才能發現控制電路和控制程序發生矛盾之處;只有進行現場調試才能后實地測試和后調整控制電路和控制程序,以適應控制系統的要求。
7. 編寫技術文件并現場試運行
經過現場調試以后,控制電路和控制程序基本被確定了,整個系統的硬件和軟件基本沒有問題了。這時就要全面整流技術文件,包括整理電路圖、PLC 程序、使用說明及幫助文件。到此工作基本結束。
使用編碼器和高速計數器,定時中斷等,可以進行旋轉體的速度周期等數據的測量,此功能在對電機測量方面有廣泛的應用。
實數的格式
實數(浮點數)由32位單精度數表示,其格式按照ANSI/IEEE754-1985標準中所描述的形式。實數按照雙字長度來存取。對于S7-200來說,浮點數精確到小數點后第六位。因而當使用一個浮點數常數時,多可以到小數點后第六位。
實數運算的精度
在計算中涉及到非常大和非常小的數,則有可能導致計算結果不精確。
字符串的格式
字符串指的是一系列字符,每個字符以字節的形式存儲。字符串的*個字節定義了字符串的長度,也就是字符的個數。一個字符串的長度可以是0到254個字符,再加上長度字節,一個字符串的大長度為255個字節。而一個字符串常量的大長度為126字節。
布爾型數據(0或1)。
S7-200CPU不支持數據類型檢測
例如:可以在加法指令中使用VW100中的值作為有符號整數,同時也可以在異或指令中將VW100中的數據當作無符號的二進制數。
S7-200提供各種變換指令,使用戶能方便地進行數據制式及表達方式的變換。
西門子PLC對檢修工藝及技術要求見如下,另外我司還舉一個西門子PLC維修實例供大家參考:
(1)測量電壓時,要用數字電壓表或精度為1%的萬能表測量
(2)電源機架,CPU主板都只能在主電源切斷時取下;
(3)在RAM模塊從CPU取下或插入CPU之前,要斷開PC的電源,這樣才能保證數據不混亂;
(4)在取下RAM模塊之前,檢查一下模塊電池是否正常工作,如果電池故障燈亮時取下模塊PAM內容將丟失;
(5)輸入/輸出板取下前也應先關掉總電源,但如果生產需要時I/0板也可在可編程控制器運行時取下,但CPU板上的QVZ(超時)燈亮;
(6)撥插模板時,要格外小心,輕拿輕放,并運離產生靜電的物品
西門子模塊6ES7212-1BE40-0XB0
外部補償—補償盒
補償盒是通過補償盒獲取熱電偶的參比接點的溫度,但補償盒必須安裝在熱電偶的參比接點處。
補償盒必須單獨供電,電源模塊必須具有充分的噪聲濾波功能,例如使用接地電纜屏蔽。
補償盒包含一個橋接電路,固定參比接點溫度標定,如果實際溫度與補償溫度有偏差,橋接熱敏電阻會發生變化,產生正的或者負的補償電壓疊加到測量電勢差上,從而達到補償調節的目的。
補償盒采用參比接點溫度為0℃的補償盒,*使用西門子帶集成電源裝置的補償盒,訂貨號如下表。
| *使用的補償盒 | 訂貨號 | ||
| 帶有集成電源裝置的參比端,用于導軌安裝 | M72166-V V V V V | ||
| 輔助電源 | B1 | 230VAC |  |
| B2 | 110VAC | ||
| B3 | 24VAC | ||
| B4 | 24VDC | ||
| 連接到熱電偶 | 1 | L型 | |
| 2 | J型 | ||
| 3 | K型 | ||
| 4 | S型 | ||
| 5 | R型 | ||
| 6 | U型 | ||
| 7 | T型 | ||
| 參考溫度 | 00 | 0℃ | |
表6 西門子參比接點的補償盒訂貨數據
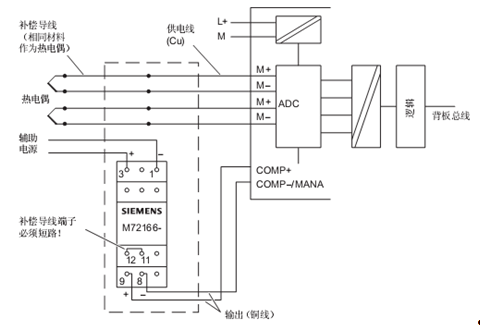
圖3 S7-300模板支持接線
圖3 類型:熱電偶通過補償導線連接到參比接點,再用銅質導線連接參比接點和模板的輸入端子構成回路,同時由一個補償盒對模板連接的所有熱電偶進行公共補償,補償盒的9,8端子連接到模板的補償端COMP+(10)和Mana(11),所以模板的所有通道必須連接同類型的熱電偶。
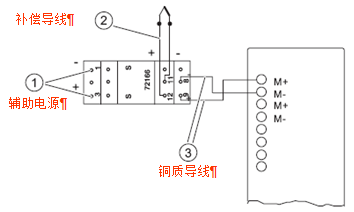
圖4 S7-400模板支持接線
圖4 類型:模板的各個通道單獨連接一個補償盒,補償盒通過熱電偶的補償導線直接連接到模板的輸入端子構成回路,所以模板的每個通道都可以使用模板支持類型的熱電偶,但是每個通道都需要補償盒。
| CPU類型 | 支持外部補償盒補償模板類型 | 可連接熱電偶個數 |
| S7-300 | 6ES7 331-7KF02-0AB0 | 多8個(同類型) |
| 6ES7 331-7KB02-0AB0 | 多2個(同類型) | |
| S7-400 | 6ES7 431-1KF10-0AB0 | 多8個(類型可不同) |
| 6ES7 431-7QH00-0AB0 | 多16個(類型可不同) |
表7 支持外部補償盒補償的模板及可接熱電偶個數
3.2.3 外部補償—熱電阻
熱電阻是通過外接電阻溫度計獲取熱電偶的參比接點的溫度,再由模板處理然后進行溫度補償,同樣熱電阻必須安裝在熱電偶的參比接點處。
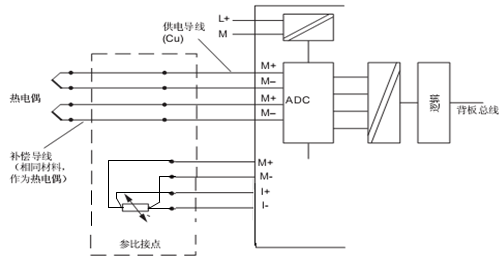
圖5 S7-300模板支持
圖5類型:參比接點電阻溫度計pt100的四根線接到模板的35,36,37,38端子,對應(M+,M-,I+,I-),可測參比接點出溫度范圍為-25℃到85℃,
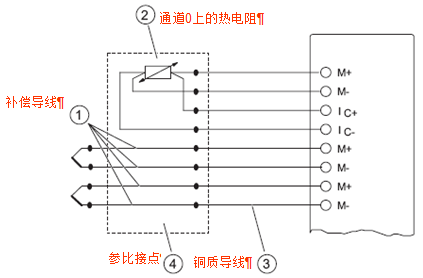
圖6 S7-400模板支持
圖6類型:參比接點電阻溫度計的四根線接到模板的通道0,占用通道。
以上這兩種,參比接點到模板的線可以用銅質導線,由于做公共補償,只能接同類型的熱電偶。
| CPU類型 | 支持熱電阻補償模板類型 | 可連接熱電偶個數 |
| S7-300 | 6ES7 331-7PF11-0AB0 | 多8個(同類型) |
| S7-400 | 6ES7 431-1KF10-0AB0 | 多6個(同類型) |
| 6ES7 431-7QH00-0AB0 | 多14個(同類型) |
表8 支持熱電阻補償的模板及可接熱電偶個數
3.2.4外部補償—固定溫度
如果外部參比接點的溫度已知且固定,可以通過選擇相應的補償由模板內部處理補償,組態設置詳見下章節。
| CPU類型 | 支持固定溫度補償模板類型 | 可連接熱電偶個數 | 可設定溫度范圍 |
| S7-300 | 6ES7 331-7PF11-0AB0 | 多8個(同類型) | 0℃或50℃ |
| S7-400 | 6ES7 431-1KF10-0AB0 | 多8個(同類型) | -273.15℃~327.67℃ |
| 6ES7 431-7QH00-0AB0 | 多16個(同類型) | -273.15℃~327.67℃ | |
| 6ES7 431-7KF00-0AB0 | 多8個(同類型) | -273.15℃~327.67℃ |
表9支持固定溫度補償的模板及可接熱電偶個數
從上表可以看出,300的模板只支持參比接點的溫度為0℃或50℃兩種,而400的模板支持可變溫度范圍,且范圍大。
3.2.4混合補償—熱電阻和固定溫度補償
另外,除單獨補償外,可以使用相同參比接點給多個模板,通過電阻溫度計進行外部補償,S7-400的模板支持這種,補償示意圖如下。
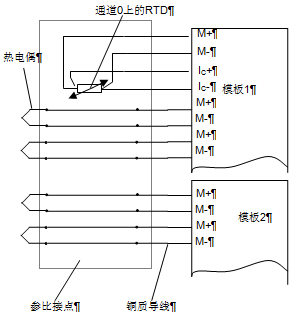
圖7 混合外部補償
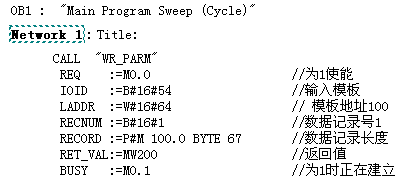
補償:如圖所示,模板2和1 有公共的參比接點,模板1進行外部電阻溫度計補償,由CPU讀取RTD的溫度,然后使用功能SFC55(WR_PARM)將溫度值寫入到模板2中,模板2選擇固定溫度補償的。
SFC55只能對模板的動態參數進行修改,模擬量輸入模板的靜態參數(數據記錄0)和動態參數(數據記錄1)的參數及數據記錄1的結構如下:
| 參數 | 數據記錄號 | 參數分配 | |
| SFC55 | STEP7 | ||
| 用于中斷的目標CPU | 0 | 否 | 是 |
| 測量 | 0 | 否 | 是 |
| 測量范圍 | 0 | 否 | 是 |
| 診斷 | 0 | 否 | 是 |
| 溫度單位 | 0 | 否 | 是 |
| 溫度 | 0 | 否 | 是 |
| 噪聲 | 0 | 否 | 是 |
| 濾波 | 0 | 否 | 是 |
| 參比接點 | 0 | 否 | 是 |
| 周期結束中斷 | 0 | 否 | 是 |
| 診斷中斷啟用 | 1 | 是 | 是 |
| 硬件中斷啟用 | 1 | 是 | 是 |
| 參考溫度 | 1 | 是 | 是 |
| 上限 | 1 | 是 | 是 |
| 下限 | 1 | 是 | 是 |
表10 S7-400模擬量輸入模板的參數
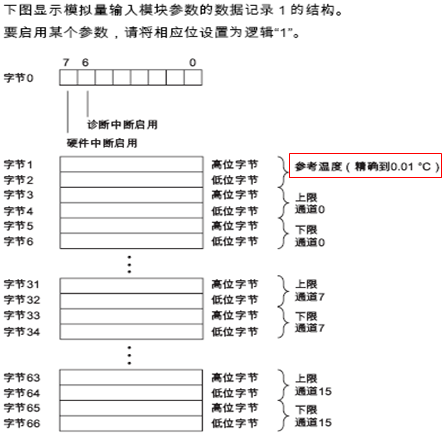
圖8 S7-400模擬量輸入模板的數據記錄1的結構
以6ES7 431-7QH00-0AB0 模擬量輸入模板為例,程序塊SFC55調用: