您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網








| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地類別 | 進口 | 應用領域 | 化工,電子 |
| 產地 | 德國 | 品牌 | 西門子 |
西門子變頻器MM440的操作面板顯示以“A"開頭的4位數字時,表示變頻器出現了報警信息;如果出現以“F"開始的4位數字時,表示變頻器出現故障,需要用戶進行處理。
如果用戶通過操作面板對電機進行啟動操作,而電機沒有啟動時,通常可以按照如下步驟進行排查:
1. 檢查參數設置,P0700是否設定正確,1-通過操作面板進行操作,2-通過數字量端子進行控
 |
| 參考價 | 面議 |
更新時間:2021-08-02 15:46:16瀏覽次數:261
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
|
|
|
西門子變頻器6SE6440-2UD33-0EB1
西門子變頻器MICROMASTER系列中包含MM420,MM430,MM440三種類型的變頻器。在自動化控制系統的驅動控制中,西門子變頻器MM4系列和西門子PLC之間需要進行通訊來實現數據的交換任務。用戶需要通過上位機或觸摸屏對通過西門子PLC來實現對西門子變頻器的遠程控制。在西門子PLC的眾多系列中,與西門子變頻器之間常用的通訊方式是USS通訊方式。本文下面就對西門子PLC與西門子變頻器之間的USS通訊的錯誤代碼做一個介紹,供用戶在實際使用過程中進行參考。
二、西門子變頻器MM4的USS通訊錯誤代碼
西門子變頻器MM4系列與西門子PLC的多個系列都可以實現USS通訊,下面對它們之間的USS通訊錯誤代碼進行說明:
其中錯誤代碼的范圍是0-10,用戶在使用過程中,如果出現了這些錯誤代碼,可以對照下面的說明進行排查故障,
1. 錯誤代碼0:表示無錯誤;
2. 錯誤代碼1:表示驅動裝置無響應;
3. 錯誤代碼2:表示來自驅動的響應中檢測到校驗和錯誤;
4. 錯誤代碼3:表示來自驅動的響應中檢測到奇偶校驗錯誤;
5. 錯誤代碼4:表示用戶程序干擾引起錯誤;
6. 錯誤代碼5:表示嘗試執行非法命令;
7. 錯誤代碼6:表示提供了無效的驅動裝置地址;
8. 錯誤代碼7:表示通信口未定義為 USS 協議;
9. 錯誤代碼8:表示通信口忙于處理其他指令;
10. 錯誤代碼9:表示驅動裝置速度設定輸入值超限;
11. 錯誤代碼10:表示驅動裝置返回的信息長度不正確;
當西門子變頻器MM440的操作面板顯示以“A"開頭的4位數字時,表示變頻器出現了報警信息;如果出現以“F"開始的4位數字時,表示變頻器出現故障,需要用戶進行處理。
如果用戶通過操作面板對電機進行啟動操作,而電機沒有啟動時,通常可以按照如下步驟進行排查:
1. 檢查參數設置,P0700是否設定正確,1-通過操作面板進行操作,2-通過數字量端子進行控制;
2. 檢查參數設置,P0010是否設置正確,P0010的含義是快速調試;
3. 確認給出的電機啟動信號是否正常;
4. 檢查參數設置,P1000信號源與實際設定是否對應,例如:若用戶設定通過外部端子給定變頻器的頻率,則在相應的端子上確認是否給定了電壓信號;
5. 需要注意的是,電動機的參數,如:電壓,功率等需要和西門子變頻器的參數匹配。
(1) 工業過程自動化新一代主控系統及其綜合自動化的開發和產業化,主要包括集散控制系統(DCS),現場總線控制系統(FCS)和以工業計算機為基礎的開放式控制系統等。重點支持若干具有工業過程綜合自動化系統產業化能力和開放能力的企業,發展具有市場竟爭力的產品,同時適當支持建設工業過程自動化的工程化驗證環境與開發能力。
??(2) *控制與優化軟件開發與產業化,主要包括*控制技術,過程優化技術,實時監控軟件平臺,信息集成軟件平臺,系統集成技術等,專項將重點支持上述具有特色和市場價值的系列軟件的產業化。
??(3) 智能儀表,執行器與變送器,成套控制裝置和成套優化系統的開發與產業化。
??就第(1)點而言,特別強調了“工業過程自動化新一代主控系統及其綜合自動化的開發和產業化。其“綜合自動化"就是要打破傳統的計算機、PLC、DCS的分工界限,構成有機組成的三電一體化的綜合自動化系統。自從我們1984年提出“三電一體化的綜合自動化系統"的觀點以來,十幾年來的事實證明這種預計是正確的。促成這種轉變的動力是科學技術的發展,是計算機技術、網絡技術、數據庫技術、顯示技術及多媒體技術的發展,而這種發展并沒有停止,并涵蓋著更多更廣泛的內容,如語音技術、有線和無線通信技術,Web信息服務技術等。所以,當今“綜合自動化"的內涵有著更深刻、更廣泛的含義,甚至可以包容我們工作,生活的各個方面。
??2 生產過程自動化系統和生產管理系統的融合
??在ISO的六層功能模型中,把從檢測、執行、驅動到公司(總廠)一級的控制和管理共分成六層功能。構成這種多層功能結構的出發點,是按工廠經營、生產管理、控制功能的劃分,而不是按控制和管理計算機系統硬件結構來劃分的。只不過過去,特別是七十年代和八十年代初,由于當初計算機技術和網絡技術的限制,以及計算機系統設計人員理解的不充分,*以來,把工廠的計算機系統按六層功能模型相對應的分成六級計算機系統的多層次結構。
??隨著計算機技術和網絡技術的發展,越來越暴露這種多層次計算機系統在數據采集,管理,數據和知識的共享,硬軟件資源共享,數據通信,軟件開發等等中的各種弊端,特別是在設備控制,過程控制,生產控制之間。以至很早就有人提出管控一體化,或者控制系統就是管理系統的觀點。美國西屋過程控制的WDPF Ovation系統就是基于這種觀點開發的,可以預計今后更多的工業過程自動化系統將會朝著這個方向發展。
??3 軟PLC和軟DCS
??由于計算機技術,特別是芯片技術的快速發展,按照摩爾定律微處器芯的速度性能每18個月將提高一倍。因此,當Intel Pentium處理器問世后不久,Pentium 2,3以及主頻為1.4GHz的Pentium 4處理器就相繼提供給市場。當廣大用戶還未來得及使用Pentium 4處理器時,5月29日Intel和HP兩家公司就聯合推出了64位的Itanium微處理器。自動化系統設備制造商和集成商難以跟上硬件技術的發展,往往出現自動化系統設備制造商和集成商的自動化系統設備的更新,發展。滯后于計算機技術的發展。(5)可編程控制器的輸出負載可能產生噪聲干擾,因此要采取措施加以抑制。
此外,對于能使用戶造成傷害的危險負載,除了在控制程序中加以考慮之外,應設計外部緊急停車電路,使得可編程控制器發生故障時,能將引起傷害的負載電源切斷。
交流輸出線和直流輸出線不要用同一根電纜,輸出線應盡量遠離高壓線和動力線,避免并行。
?機器人控制
?掃描器,條碼閱讀器,等
特殊功能塊包括在通信功能手冊的供貨范圍之內。
使用多點接口 (MPI) 進行數據通信
MPI(多點接口)是集成在 SIMATIC S7-300 CPU 上的通信接口。它可用于簡單的網絡任務。
?MPI 可以同時連接多個配有 STEP 7 的編程器/PC、HMI 系統(OP/OS)、S7-300 和 S7-400。
?全局數據:
“全局數據通信"服務可以在聯網的 CPU 間周期性地進行數據交換。 一個 S7-300 CPU 可與多達 4 個數據包交換數據,每個數據包含有 22 字節數據,可同時有 16 個 CPU 參與數據交換(使用 STEP 7 V4.x)。?
例如,可以允許一個 CPU 訪問另一個 CPU 的輸入/輸出。只可通過 MPI 接口進行全局數據通信。
?內部通信總線(C-bus):
CPU 的 MPI 直接連接到 S7-300 的 C 總線。因此,可以通過 MPI 從編程器直接找到與 C 總線連接的 FM/CP 模塊的地址。
對于各種PLC的現場硬件組態和軟件調試,通常有經驗的工程師應該先花一些時間對自己的現場工作進行一個簡單的規劃,通常應當采取如下的步驟:
(1) 系統的規劃
首先,必須深入了解系統所需求的功能,并調查可能的控制方法,同時與用戶或設計院共同探討之操作程序,根據所歸納之結論來擬定系統規劃,決定所采行的PLC系統架構、所需之I/O點數與I/O模塊型式。
(2) I/O模塊選擇與地址設定
當I/O模塊選妥后,依據所規劃之I/O點使用情形,由PLC的CPU系統自動設定I/O地址,或由使用者自定I/O模塊的地址。
(3) 梯形圖程序的編寫與系統配線
在確定好實際的I/O地址之后,依據系統需求的功能,開始著手梯形圖程序的編寫。同時,I/O之地址已設定妥當,故系統之配線亦可著手進行。
(4) 梯形圖程序的仿真與修改
在梯形圖程序撰寫完成后,將程序寫入PLC,便可先行在PC與OpenPLC系統做在線連接,以執行在線仿真作業。倘若程序執行功能有誤,則必須進行除錯,并修改梯形圖程序。
(5) 系統試車與實際運轉
在線上程序仿真作業下,若梯形圖程序執行功能正確無誤,且系統配線亦完成后,便可使系統納入實際運轉,項目計劃亦告完成。
(6)程序注釋和歸檔
為確保日后維修的便利,要將試車無誤可供實際運轉的梯形圖程序做批注,并加以整理歸檔,方能縮短日后維修與查閱程序之時間。這是職業工程師的良好習慣,無論對今后自己進行維護,或者移交用戶,這都會帶來*的便利,而且是你的職業水準的一個體現。
以上工作中,復雜的系統規劃可能需要幾天甚至更長的時間,但一個簡單的系統規劃在一個具有良好的職業習慣的編程工程師手中,可能只需要幾個小時。
西門子變頻器6SE6440-2UD33-0EB1

選擇驅動為MM440驅動器,如圖5所示
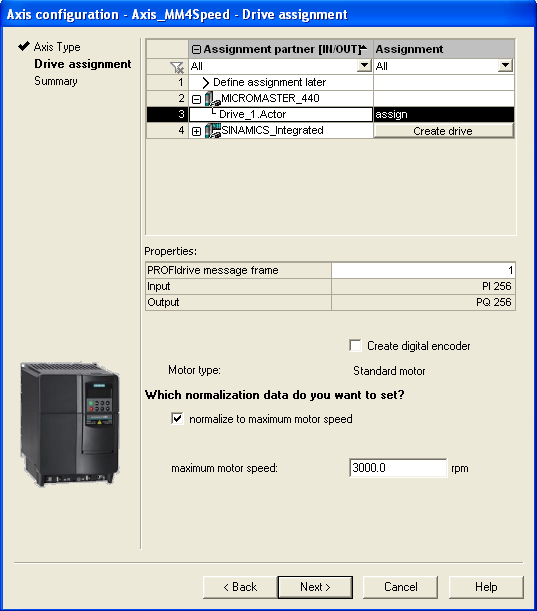
圖5.選擇MM440驅動
西門子6SE6440-2UD33-0EB1
(7)在SCOUT項目中編寫控制MM440速度軸的程序,如圖6所示
 SIEMENS西門子6SE6440-2UD25-5CA1
SIEMENS西門子6SE6440-2UD25-5CA1
圖6.編寫MM440速度軸的控制程序
4項目實例
D435控制MM440速度軸的配置示例程序請參考附帶文件:
SimotionControlMM440.Zip
此FAQ適用于MICROMASTER 430 和 MICROMASTER 440 變頻器。
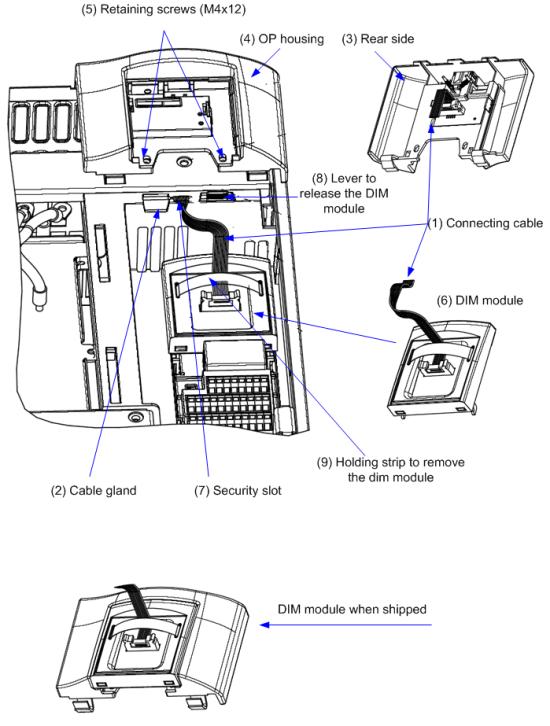
描述
DIM 模塊 (數據接口模塊)是用來連接BOP插槽和控制模塊之間的模塊。
對于MICROMASTER 430 / 440 (結構尺寸D 到F),DIM 模塊可以做為備件采購,詳細定貨號[MLFB]6SE6400-7AA00-0AF0。
它是由單個的組件組成, 具體由下列三部分組成:
| 組件號,非訂貨號 | |
| DIM 模塊 | 組件號.: MC1790L816B01 |
| OP 支架 | 組件號.: A5E00182243 |
| 連接電纜 | 組件號.: A5E00331744 |
裝配
把要連接的線纜(1)的一端穿過密封孔(2),插入到OP支架(4)背面(3)的插槽內.
把OP支架連接到變頻器上, 卡在為支架預留的位置(5)上, 結構尺寸 F ,并用 2 x M4 x 12 screws (0.8Nm) 螺釘固定.
把DIM接口板(6)插入預先提供的插槽內,把線纜的另一端插到DIM接口板的插槽內,并且把線纜移入安全槽(7)內.
注解:
通過向上壓解鎖手柄(8), 同時向外拉接口模板上的夾條(9),接口模板(6)能夠被拆下來. 。