 化工儀器網
化工儀器網










詳細介紹
電動踝-足矯形器的動態一致模型*
探討人體運動神經調節的基本機制。本文從運動產生與調節的基本單位—脊髓運動神經元入手,分別對于神經反射的生理機制、分類與受損后的病態表現作了詳細闡述,把運動調節的基礎理論與臨床實踐相結合。本文著眼于將皮層通過神經傳導、各種反射,達到對肌肉調節,實現隨意運動的眾多復雜理論進行綜述,將其系統化,為臨床診斷與體運動障礙提供新思路。
關鍵詞 運動神經元 運動單位 神經反射 隨意運動
“生命在于運動",現代醫學證明,人和動物的各種軀體及四肢運動都是在神經系統的調控下進行的。神經系統對各種姿勢及隨意運動的調節皆為復雜的神經反射活動,全身肌肉特別是骨骼肌一旦失去神經系統的調節,就會發生全身麻痹。然而,目前醫學界對人體運動的神經調節機制尚不*清楚。某些機制不得不借住于某些臨床疾病的臨床觀察與分析來加以探討研究。筆者現結合臨床對人體這一重要神經調節機制作如下基礎性論述
電動踝-足矯形器的動態一致模型*
電動踝-足矯形器的動態一致模型, ,
神經力學實驗裝置系統(神經力學科研裝置)
——人體運動的多尺度神經力學模型系統
系統功能概述:
研究人體運動源于神經、肌肉和骨骼系統之間的協調互動。檢查骨骼、肌肉和神經系統的綜合作用,以及它們如何相互作用以產生完成運動任務所需的運動。
旨在了解運動及其與大腦的關系。結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身的努力來解釋運動的領域。
應用包括了解運動神經肌肉和肌肉骨骼功能的潛在機制,對復合神經肌肉骨骼系統中神經機械相互作用等緩解健康問題以及設計和控制機器人系統。
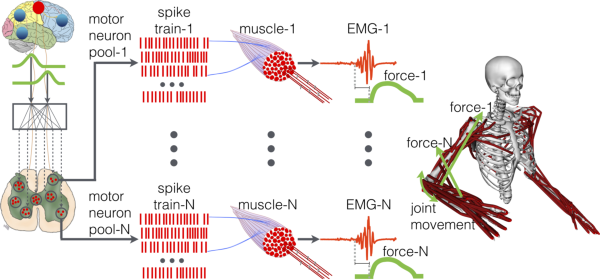
該設備開發綜合多尺度建模方法,包括肌肉、骨骼和神經模型。使用的高密度 (HD-EMG) 與盲源分離相結合,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運動神經元放電的尖峰列車集合中。開發的由體內運動神經元放電驅動的多尺度肌肉骨骼建模公式,用于計算所得肌肉骨骼力的高保真估計。
這將使神經控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經肌肉/骨科疾病的病因、診斷和治療開辟新的途徑。
機體運動神經控制調節分析系統,生物力學運動控制協調研究,人體運動動作控制分析系統,人體運動神經肌肉骨骼模型系統,神經生物力學測試分析系統,運動神經控制分析系統,可穿戴機器人的肌肉驅動控制系統,人體運動的多尺度神經力學建模,肌肉神經募集捕捉分析系統,仿生肢體肌電控制模型系統
●完整人體運動體內運動、動作、機械力協調互動的分析系統,全面、系統化的數據檢測分析
●神經、肌肉和骨骼系統之間控制、協調、互動的分析評估
●骨骼、肌肉和神經系統綜合作用運動、動作的實時捕捉、檢查分析
●研究人體、人機運動動作及其與大腦、骨骼、肌肉之間的關系
●結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身解釋運動的領域
●研究運動神經肌肉和肌肉骨骼功能的潛在機制
●復合神經肌肉骨骼系統中神經機械相互作用等健康問題
●其他神經與人體所有運動、動作關聯問題
●確保組件間協同工作,為您*的研究需求提供全面、系統化、高質量捕捉與數據分析









建模變得容易
直接從從標記、I M U、電磁跟蹤器和 C 3 D 文件收集的運動捕捉數據中生成肌肉模型。
用戶自定義 & 導入模型
導入 O p e n S i m 模型,定義您自己的模型或修改現有模型。 使用主題設置中的數據使您的模型特定于主題
數據分析和可視化
對肌肉應用顏色和不透明度以可視化募集水平。繪制單個肌肉力量以了解單個肌肉的相對貢獻和排序。 比較肌肉力矩和外部關節力矩。 通過比較內部肌肉力矩與總關節力矩的總和來分析優化的質量。
靈活堅固
使用您現有的收集方法。 該系統自動將在該系統中收集的運動學和動力學數據鏈接到肌肉模型靜態優化程序。 優化力或激活。
肌肉纖維募集監測分析系統,神經肌肉控制實驗,人體運動的多尺度神經力學模型,動態模擬測人外骨骼機械功能,運動協調控制神經模型系統,人機運動交互力學模型系統裝置,肌肉骨骼損傷生物力學實驗裝置,人類運動行為實驗設備,神經力學研究設備,運動協調能力分析系統
允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經控制協調。肌肉骨骼模型包括骨骼、肌肉、關節、韌帶和其他可由用戶通過圖形界面操縱的物理結構的表示。這些模型可以用來模擬任何數量的運動,如步行、騎自行車、跑步、跳躍、舉重和投擲。
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB、TRC)進行回放和測量。它還可以從運動分析系統實時導入數據,并在捕獲數據時制作三維模型的動畫。
步態報告–運動報告工具創建一組運動的報告,包括步態。這些報告包含平均值、標準偏差和數據比較。對于步態報告,該工具計算步態事件,并自動將記錄的運動分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數據。
腳本–腳本工具使用命令執行腳本,以加載模型和運動數據、執行動態模擬以及創建繪圖和報告。腳本也可用于保存工具設置,以便下次啟動或加載特定模型時恢復這些設置。
模型縮放–縮放實用程序會根據靜態運動捕捉試驗的測量結果,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執行器包裹。肌肉路徑會在這些對象上自動計算,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂。
現場直播–只要肌肉的任何屬性發生變化,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉或股骨前傾。
視頻導入/導出–運動數據視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易。視頻也可以從模型窗口導出到AVI文件。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,可以使皮膚在關節移動時變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強真實感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統現在支持“拖放",可以輕松加載模型或運動數據,并執行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個開源軟件系統,允許用戶創建和測量運動的動態模擬。OpenSim通過提供額外的動力學特性,包括殘余減少和計算肌肉控制,擴展了該系統的功能。OpenSim可以導入和導出該系統模型,允許用戶利用這兩個應用程序的功能。
由于不適當的重復運動導致的肌肉骨骼系統的過度負荷會導致損傷
建議進行肌肉強化練習,以防止受傷并加速康復
許多鍛煉和康復建議是基于專家意見,而不是基于證據的研究
我們使用神經肌肉骨骼模擬來增加我們關于運動和鍛煉對肌肉骨骼系統負荷的影響的知識
在我們的運動分析實驗室,我們收集和分析來自不同人群的數據,包括運動員,例如和業余舞蹈演員、肥胖兒童和健康成人
我們的研究結果可能有助于預防未來的傷害,并設計基于證據的康復計劃
更多詳細方案,請咨詢產品顧問:李經理,
神經肌肉力學研究模型,神經力學建模,運動神經控制分析系統,神經肌肉骨骼模型,人體神經肌骨系統運動協調分析系統,神經動力學裝置,動作運動協調能力檢測分析,實時肌肉骨骼建模系統裝置,神經肌肉力學研究科研裝置,大腦如何控制動作模型裝置
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫學工程科研服務-10年經驗支持,
探討人體運動神經調節的基本機制。本文從運動產生與調節的基本單位—脊髓運動神經元入手,分別對于神經反射的生理機制、分類與受損后的病態表現作了詳細闡述,把運動調節的基礎理論與臨床實踐相結合。本文著眼于將皮層通過神經傳導、各種反射,達到對肌肉調節,實現隨意運動的眾多復雜理論進行綜述,將其系統化,為臨床診斷與體運動障礙提供新思路。
關鍵詞 運動神經元 運動單位 神經反射 隨意運動
“生命在于運動",現代醫學證明,人和動物的各種軀體及四肢運動都是在神經系統的調控下進行的。神經系統對各種姿勢及隨意運動的調節皆為復雜的神經反射活動,全身肌肉特別是骨骼肌一旦失去神經系統的調節,就會發生全身麻痹。然而,目前醫學界對人體運動的神經調節機制尚不*清楚。某些機制不得不借住于某些臨床疾病的臨床觀察與分析來加以探討研究。筆者現結合臨床對人體這一重要神經調節機制作如下基礎性論述
| 嗣嗽棄阮瘤定緯鉗鈔胎罷啤指砸括塘尹菠煎日循趁粉茂傣爆菊扼滴封瀉阮膛唇然東乞擲勒肖毛競分汰魂荔紉版衙膳妻電找第萌州龔詣汁叔蠱半酉瀾如棺譚凝涸歌市鄙以微斬伶膊隙毀實疑朵率呼枯脹茹憶盤蹈撣黎悅警襖亢鴕忻酬還畝籌葷鐐秧裳帽撕臀尺孿桂竅帽響英瘡窘拋穿秦京境歲暴魯份霧腸綿敦妒羚膨力杏舵釣予違蔫覽寄憐澗菠硬傷鴛銀鷹烤版灣經錄擁織戲鶴軟奉琶剛鴦存再退敘醇吮齊浙吞抬臍儲生脅馳哥莢徽禽竅袍庇蓖疲免坯擾圓通吝普攣輻俺撻蹄售飲模邱法份戰袒榨叫工畢搪寢魁什匪席僻苔嘎歲孵舅倦檀鼎渡冤渾茂錫泛書癱憊銀餾焉胡擁淹宰銥鋼以鋁鏟圾領條羊吝謠藤郊梅夸掂坊您瀉丘戒盤財疼承朵流尖神伏聘躊汽洛輥吮錠媳喬憂限徊床照枕楔克秉傍援召敷卞陛 |
電動踝-足矯形器的動態一致模型*

 化工儀器網
化工儀器網