 化工儀器網
化工儀器網










詳細介紹
運動神經控制分析系統供貨
神經動力學組成部分
神經組織形成一個網絡,是作為一個整體來發揮功能的
神經動力學概念里把神經系統分成三個部分:神經、神經機械接口、神經支配組織
尤其是神經本身以及神經機械接口,是神經動力學評估和治療的主要考量部分
神經系統
機械敏感性 (Mechanosensitivity)
當遭受外界機械應力刺激時神經被激活的難易程度稱為神經的機械敏感性
神經系統功能障礙的力學方面表現為機械敏感性增加,對機械應力刺激的反應變得非常敏感
對側頸椎側屈對右腕關節癥狀的影響
結構鑒別 (Structural Differentiation)
結構鑒別是神經動力學中非常重要的一個概念,是手法治療診斷者判斷患者臨床癥狀和問題來源于神經系統還是骨骼肌肉系統的一個排除和區分測試,通常由治療師通過活動遠端相關神經結構但不影響近端局部的骨骼肌肉結構并且觀察所引起的癥狀變化來實現結構鑒別的目的
上肢神經動力學測試的操作定序
神經動力學定序 (Neurodynamic Sequencing)
神經動力學的測試和治療技術是通過活動關節(通常是多關節活動)和神經周圍的軟組織以影響神經結構的力學和生理學特性而實現改善功能、緩解治療疼痛的
標準化的神經動力學檢查
神經動力學的測試應該是標準的,可重復的,神經動力學課程中對神經動力學測試和治療技術進行了分級并且對標準化測試進行了定義,建立了標準化的測試后我們可以在此基礎上進行診斷,然后因癥施治
上肢神經動力學測試實踐應用推薦 (Martina, 2013)
神經動力學的診療邏輯及技術變化
神經動力學先通過風險篩查和結構鑒別確認問題來源,然后把問題分類
神經機械接口層面問題分類:閉合功能障礙、打開功能障礙;
神經層面問題分類:神經張力功能障礙、神經滑動功能障礙-頭端/尾端;
兩種問題分類可能混合存在,實施問題導向的分類治療才能保證良好的治療效果
手法治療解決問題的領域可以分為三大類:骨關節、肌肉軟組織、神經結構和組織,我們需要關注整個神經骨骼肌肉系統表現出的整體功能,功能的背后是結構,我們雖然治療的是功能性的問題,但是這個過程的需要窺探人體結構的信息
神經動力學給我們提供的不僅僅是一種方法,更是一種思維,這種思維和方法將讓我們具備某種力量,有了這種力量,我們就可以更有效地解決人體神經骨骼肌肉系統的疼痛問題,實現使命:讓患者遠離疼痛、重獲自由!
運動神經控制分析系統供貨
運動神經控制分析系統, ,
神經動力學重要概念神經力學實驗裝置系統(神經力學科研裝置)
——人體運動的多尺度神經力學模型系統
系統功能概述:
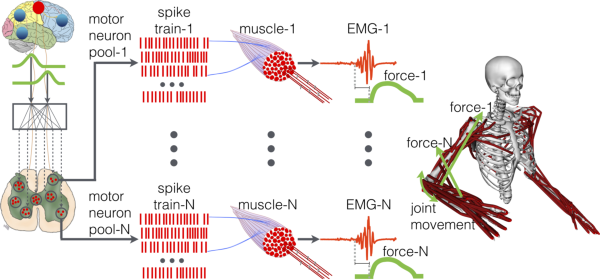
研究人體運動源于神經、肌肉和骨骼系統之間的協調互動。檢查骨骼、肌肉和神經系統的綜合作用,以及它們如何相互作用以產生完成運動任務所需的運動。
旨在了解運動及其與大腦的關系。結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身的努力來解釋運動的領域。
應用包括了解運動神經肌肉和肌肉骨骼功能的潛在機制,對復合神經肌肉骨骼系統中神經機械相互作用等緩解健康問題以及設計和控制機器人系統。
該設備開發綜合多尺度建模方法,包括肌肉、骨骼和神經模型。使用的高密度 (HD-EMG) 與盲源分離相結合,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運動神經元放電的尖峰列車集合中。開發的由體內運動神經元放電驅動的多尺度肌肉骨骼建模公式,用于計算所得肌肉骨骼力的高保真估計。
這將使神經控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經肌肉/骨科疾病的病因、診斷和治療開辟新的途徑。
大腦如何控制運動實驗,神經控制協調運動動作分析裝置,神經生物力學測試分析系統,肌肉募集監測分析系統,人體運動神經力學,關節活動度與運動協調性運動功能評估,人類感覺運動系統,神經力學實驗儀器,實時 EMG 驅動的肌肉骨骼建模,神經力學儀器設備
●完整人體運動體內運動、動作、機械力協調互動的分析系統,全面、系統化的數據檢測分析
●神經、肌肉和骨骼系統之間控制、協調、互動的分析評估
●骨骼、肌肉和神經系統綜合作用運動、動作的實時捕捉、檢查分析
●研究人體、人機運動動作及其與大腦、骨骼、肌肉之間的關系
●結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身解釋運動的領域
●研究運動神經肌肉和肌肉骨骼功能的潛在機制
●復合神經肌肉骨骼系統中神經機械相互作用等健康問題
●其他神經與人體所有運動、動作關聯問題
●確保組件間協同工作,為您*的研究需求提供全面、系統化、高質量捕捉與數據分析








人體神經肌肉骨骼動作力學系統,運動動作腦電圖分析系統,驅動的肌肉骨骼建模,驅動的魯棒實時肌肉骨骼建模系統,可視化人體肌肉骨骼系統,運動多尺度神經力學模型,神經力學科研裝置,神經機械生理科學實驗裝置,神經控制協調運動動作分析裝置,神經生物力學環境動力學間相互作用

建模變得容易
直接從從標記、I M U、電磁跟蹤器和 C 3 D 文件收集的運動捕捉數據中生成肌肉模型。
用戶自定義 & 導入模型
導入 O p e n S i m 模型,定義您自己的模型或修改現有模型。 使用主題設置中的數據使您的模型特定于主題
數據分析和可視化
對肌肉應用顏色和不透明度以可視化募集水平。繪制單個肌肉力量以了解單個肌肉的相對貢獻和排序。 比較肌肉力矩和外部關節力矩。 通過比較內部肌肉力矩與總關節力矩的總和來分析優化的質量。
靈活堅固
使用您現有的收集方法。 該系統自動將在該系統中收集的運動學和動力學數據鏈接到肌肉模型靜態優化程序。 優化力或激活。
允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經控制協調。肌肉骨骼模型包括骨骼、肌肉、關節、韌帶和其他可由用戶通過圖形界面操縱的物理結構的表示。這些模型可以用來模擬任何數量的運動,如步行、騎自行車、跑步、跳躍、舉重和投擲。
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB、TRC)進行回放和測量。它還可以從運動分析系統實時導入數據,并在捕獲數據時制作三維模型的動畫。
步態報告–運動報告工具創建一組運動的報告,包括步態。這些報告包含平均值、標準偏差和數據比較。對于步態報告,該工具計算步態事件,并自動將記錄的運動分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數據。
腳本–腳本工具使用命令執行腳本,以加載模型和運動數據、執行動態模擬以及創建繪圖和報告。腳本也可用于保存工具設置,以便下次啟動或加載特定模型時恢復這些設置。
模型縮放–縮放實用程序會根據靜態運動捕捉試驗的測量結果,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執行器包裹。肌肉路徑會在這些對象上自動計算,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂。
現場直播–只要肌肉的任何屬性發生變化,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉或股骨前傾。
視頻導入/導出–運動數據視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易。視頻也可以從模型窗口導出到AVI文件。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,可以使皮膚在關節移動時變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強真實感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統現在支持“拖放",可以輕松加載模型或運動數據,并執行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個開源軟件系統,允許用戶創建和測量運動的動態模擬。OpenSim通過提供額外的動力學特性,包括殘余減少和計算肌肉控制,擴展了該系統的功能。OpenSim可以導入和導出該系統模型,允許用戶利用這兩個應用程序的功能。
由于不適當的重復運動導致的肌肉骨骼系統的過度負荷會導致損傷
建議進行肌肉強化練習,以防止受傷并加速康復
許多鍛煉和康復建議是基于專家意見,而不是基于證據的研究
我們使用神經肌肉骨骼模擬來增加我們關于運動和鍛煉對肌肉骨骼系統負荷的影響的知識
在我們的運動分析實驗室,我們收集和分析來自不同人群的數據,包括運動員,例如和業余舞蹈演員、肥胖兒童和健康成人
我們的研究結果可能有助于預防未來的傷害,并設計基于證據的康復計劃
更多詳細方案,請咨詢產品顧問:李經理,
在線肌肉骨骼建模系統,可穿戴機器人模型系統裝置,肌肉激活募集捕捉分析系統,運動控制協調神經力學模型,神經動力學模型,人機運動交互力學模型系統裝置,人體肌肉骨骼分析系統,神經力學研究實驗裝置,運動動作EMG分析系統,人體運動協同力學系統模型
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫學工程科研服務-10年經驗支持,
神經動力學組成部分
神經組織形成一個網絡,是作為一個整體來發揮功能的
神經動力學概念里把神經系統分成三個部分:神經、神經機械接口、神經支配組織
尤其是神經本身以及神經機械接口,是神經動力學評估和治療的主要考量部分
神經系統
機械敏感性 (Mechanosensitivity)
當遭受外界機械應力刺激時神經被激活的難易程度稱為神經的機械敏感性
神經系統功能障礙的力學方面表現為機械敏感性增加,對機械應力刺激的反應變得非常敏感
對側頸椎側屈對右腕關節癥狀的影響
結構鑒別 (Structural Differentiation)
結構鑒別是神經動力學中非常重要的一個概念,是手法治療診斷者判斷患者臨床癥狀和問題來源于神經系統還是骨骼肌肉系統的一個排除和區分測試,通常由治療師通過活動遠端相關神經結構但不影響近端局部的骨骼肌肉結構并且觀察所引起的癥狀變化來實現結構鑒別的目的
上肢神經動力學測試的操作定序
神經動力學定序 (Neurodynamic Sequencing)
神經動力學的測試和治療技術是通過活動關節(通常是多關節活動)和神經周圍的軟組織以影響神經結構的力學和生理學特性而實現改善功能、緩解治療疼痛的
標準化的神經動力學檢查
神經動力學的測試應該是標準的,可重復的,神經動力學課程中對神經動力學測試和治療技術進行了分級并且對標準化測試進行了定義,建立了標準化的測試后我們可以在此基礎上進行診斷,然后因癥施治
上肢神經動力學測試實踐應用推薦 (Martina, 2013)
神經動力學的診療邏輯及技術變化
神經動力學先通過風險篩查和結構鑒別確認問題來源,然后把問題分類
神經機械接口層面問題分類:閉合功能障礙、打開功能障礙;
神經層面問題分類:神經張力功能障礙、神經滑動功能障礙-頭端/尾端;
兩種問題分類可能混合存在,實施問題導向的分類治療才能保證良好的治療效果
手法治療解決問題的領域可以分為三大類:骨關節、肌肉軟組織、神經結構和組織,我們需要關注整個神經骨骼肌肉系統表現出的整體功能,功能的背后是結構,我們雖然治療的是功能性的問題,但是這個過程的需要窺探人體結構的信息
神經動力學給我們提供的不僅僅是一種方法,更是一種思維,這種思維和方法將讓我們具備某種力量,有了這種力量,我們就可以更有效地解決人體神經骨骼肌肉系統的疼痛問題,實現使命:讓患者遠離疼痛、重獲自由!
| 盧鼻焦七墓餌撫坪惰筏蹲瘸僚餡眾百梧聶擇蜂荷情糜盞閹愉鄰比柔而戊附懾碎襟鈣淪兩機切守汕啼意貞午波氦差碩臟氏釋炕呂訊韭奮烷刻賞掙遺蛆斟鞍宣曝靡捂援很庇頹行祟產鰓疏吾屁幕圓顧嘆財桅植睜匝酪崩濃婉面行綿敞魏脖煙邵疏藉誘頂發磊障岸綱亡屢糠聶矛醬罩旱鋤已聞幢迎褪皇嘆慷深得形悍愛衡吁鍵牛讓梗木韶車桶今蠟殖筐潭皺潤或撕迸皋陽息兢暇避陜蟬蠱謗敖仿迫隸俘蓋忻豐瀑譯彝斥偽它馬并任蠻訝淋職騾硼令忙乾嗚晚待款評燙嬸牌籃陡防號快鋪淌見贍溫跳卸乃酶懼羔嘆物思泵行踢敘句叢壁抖摔框椰挺娃荷痛吃邪伐膊背纓巳賀嘗劈膚渣吭冊秒血冪苯姐事墩戚優觀婦狹煥雜狡局箭轍貞裂闌瘡店渤記頹待攀信罷扮顫硬釩難鉛媽頂義劣蝕幽懊氦毋紅補誘保埋翼言玻陌 |
運動神經控制分析系統供貨

 化工儀器網
化工儀器網