 |
東莞市廣聯自動化科技有限公司
主營產品: ROSS電磁閥,ATOS葉片泵,穆格伺服比例閥,美國SUN插裝閥,安捷倫E4990A |

聯系電話
13380184263

公司信息
- 聯系人:
- 吳小姐
- 電話:
- 0769-22301028
- 手機:
- 13380184263
- 傳真:
- 0769-89775372
- 地址:
- 廣東省東莞市南城街道莞太路南城段115號旺南駒大廈1號樓1506
- 郵編:
- 523000
德國REXRTOH速度傳感器R917002704參數
2020-12-1 閱讀(462)
德國REXRTOH速度傳感器R917002704參數
特征
- 旋轉方向檢測
- 檢測甚至更低的轉速
- 專為移動應用的苛刻要求而開發
- 汽車質量
- 安裝簡單,無需設置工作
- 當前界面
- 霍爾測量原理
- 測量范圍1 … 5000赫茲
- 輸出信號電流方波信號
- 電源電壓4.5 ... 20伏
- 防護等級IP69K
德國REXRTOH速度傳感器R917002704參數
產品說明
基于霍爾效應的DSM1-10速度傳感器是專門為在移動工作機器的惡劣條件下使用而開發的。傳感器收集鐵磁齒輪或沖片的速度信號。作為一個有源傳感器,當它這樣做時,它傳遞一個與速度無關的恒定幅度的信號。傳感器之所以與眾不同,不僅是因為它可以檢測旋轉方向,還因為它具有其他診斷功能,例如:
靜止檢測
‐的
臨界氣隙
‐的
關鍵安裝位置
‐的
應用示例
由于其緊湊而堅固的設計,該傳感器適合集成使用
在用于車輪速度采集的車輪軸承中
‐的
在變速器或齒輪級中
‐的
公共汽車、卡車和工程機械中的風扇驅動裝置(7至20千瓦)
‐的
在壓路機和攤鋪機的振動驅動中
‐的
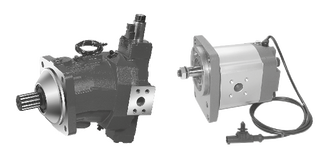
示例:
帶DSM外齒輪電機的軸向活塞電機
框圖
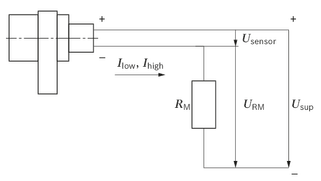
U傳感器 | 傳感器工作電壓 |
U吃晚飯 | 電源電壓 |
URM | 測量電阻處的信號電壓 |
i低的,i高的 | 傳感器電流 |
rM | 測量電阻器 |
雙線電流接口用于信號傳輸。傳感器提供電流信號。低電流(i低的=有源元件的自身電流)被解釋為低信號。高電流(i高的=i低的+∏i;∏i=來自與有源元件平行的路徑的附加電流)被解釋為高電流。控制單元中在測量電阻處從傳感器接收的電流rM被轉換成電壓信號。評估電路基于電壓電平檢測高信號還是低信號。
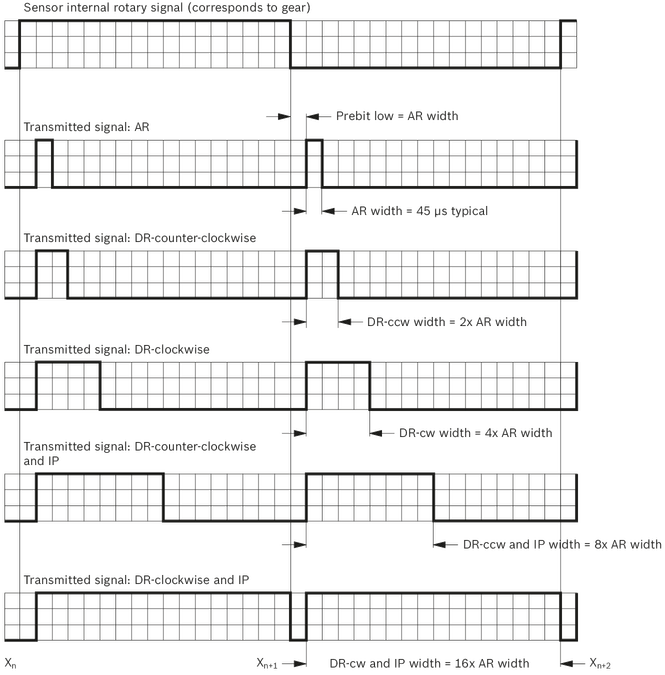
輸出信號
DSM1-10輸出信號由DSM1-10評估電子設備產生的等幅方波信號組成。單個脈沖的長度提供了關于旋轉方向和安裝位置任何誤差的信息。
評估電子器件在傳感器內部速度信號的每個邊沿之后產生一個限定長度的高脈沖,由此高脈沖的長度由要傳輸的信息限定。例如,左邊的信息旋轉方向由90秒長脈沖描述,右邊的信息旋轉方向由180秒長脈沖描述。
為了在高速下有長的高脈沖時仍然輸出轉速信息,低時間(前位低)總是在高脈沖之前插入。因此,盡管信號中的附加信息在較高的轉速下丟失(脈沖被低時間特征截斷),轉速信息的可靠輸出可能達到大頻率(上游低時間+短高脈沖)。
如果輸出氣隙儲備信號,則其他信號重疊(AR占優勢),即既不輸出旋轉方向信號也不輸出安裝位置信號。
信號形狀
氣隙儲備和安裝位置
傳感器對磁流的變化做出反應。如果齒輪和傳感器之間的氣隙過高,信號輸出可能會受到不利影響:
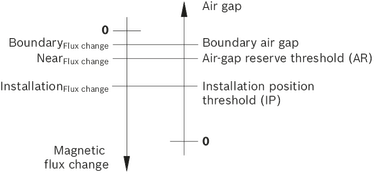
極限范圍極限通量變化
小于極限通量變化對于磁流變化,可能會出現信號丟失。
近景近景通量變化
不到近通量變化對于磁流變化,輸出AR位。
安裝位置安裝通量變化
小于安裝通量變化對于磁流變化,輸出IP位。
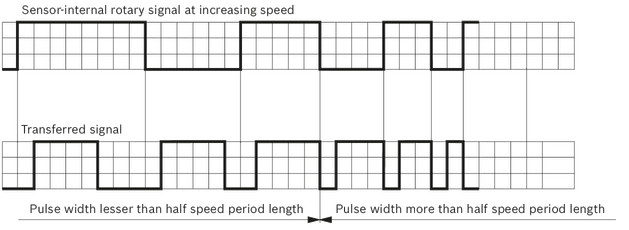
隨著轉速增加的行為
隨著轉速的增加,在輸出計劃長度的信號之前,會檢測到車輪上的下一個表面。在這些情況下,信號會縮短,并且在每個邊沿覆蓋信號后會出現零時間(45 μs)。這確保了脈沖頻率以及轉速始終正確傳輸。轉速信息的丟失并不重要,因為由于高轉速,旋轉方向在那個時間點不能改變。如果旋轉速度降低(例如減速直到旋轉方向改變),則信號再次*輸出,并且旋轉方向的改變被檢測到。
停滯不前的行為
沒有檢測到速度信號后的傳感器信號
一秒鐘內:
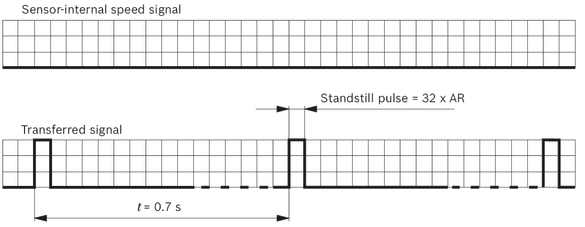
描述
當車輛靜止時,傳感器每0.7秒輸出1.44毫秒的脈沖。只要沒有檢測到速度信號,這些脈沖也會在欠壓后輸出。
初始化也在靜止狀態下進行。該初始化持續255到345秒。在此期間無法檢測到信號變化。
退出靜止和/或啟動信號
當確定輸出值(頻率、旋轉方向等)時。),可能需要一定數量的脈沖來確保提供適當的信息。
當從靜止狀態或欠壓狀態后啟動時,傳感器首先被設置為未校準狀態(信號未偏移補償)。同樣在該階段,傳感器在第二信號脈沖開始時提供正確的頻率信號,并且另外,在典型條件下,在第三信號脈沖時提供正確的旋轉方向信號。旋轉方向的正確輸出多需要七個齒/邊,具體取決于安裝位置。在這種模式下,磁輸入信號的小值和大值用作觸發點。
在非校準模式下輸出信號期間,傳感器對信號進行校準(偏移補償)。傳感器然后自動切換到校準模式。從這一點開始,磁輸入信號的過零點被用作觸發點。切換到校準模式時,輸出信號的相移(大值–90°和/或+90°)可能在極少數情況下發生。
在非校準模式下輸出的信號脈沖數多為五個。
信號容差
以下持續時間(小值、標稱值、大值)由傳感器內部元件的公差決定,適用于各種情況:
脈沖名稱 | 脈沖寬度t脈搏 | ||||
| 低限度 | 名義上的 | z高的 | ||
預調低 | tVorbit | μs | 37 | 45 | 53 |
氣隙儲備 | tAR | μs | 37 | 45 | 53 |
逆時針旋轉方向 | t醫生-《特定常規武器公約》 | μs | 74 | 90 | 106 |
順時針旋轉方向 | t災難恢復連續波 | μs | 149 | 180 | 211 |
逆時針旋轉方向和安裝位置信號1) | t災難恢復-特定常規武器公約/知識產權 | μs | 298 | 360 | 422 |
順時針旋轉方向和安裝位置信號1) | t災難恢復-連續波/知識產權 | μs | 597 | 720 | 843 |
停頓 停止 | t脈沖停止 | μs | 1194 | 1440 | 1685 |
靜止檢測 | t停止 | 女士 | 611 | 737 | 863 |
| 1) | 脈沖日間行車燈/日間行車燈和/或日間行車燈-連續行車燈/日間行車燈僅在信號頻率約為1/2時輸出。117赫茲。高于該頻率,該脈沖隨后被較短的災難恢復常規武器和/或災難恢復連續波取代。 |
振動
靜止時編碼器輪的振動會產生傳感器錯誤信號。
在控制單元的應用
力士樂博達控制器的應用
DSM1-10可通過以下BODAS控制單元讀取:RC系列21、22、30和31。
注意:
應考慮所用生化需氧量控制單元的當前數據表。
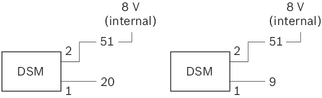
RC2-2/21
2個輸入
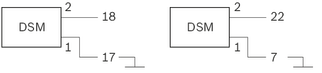
RCE12-4/22
2個輸入
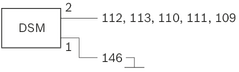
RC28-14/30,RC20-10/30,RC12-10/30
5個輸入
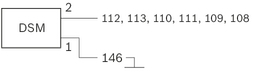
RC36-20/30
6個輸入
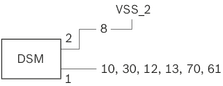
RC10-10/31
6個輸入
與其他控制單元一起應用
基本用途
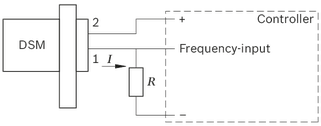
電流i以脈沖形式提供傳感器信息(參見“輸出信號”章節或詳細信息),其低電平和高電平如下:
i | 低限度 | 名義上的 | z高的 | |
i低的 | 媽 | 5.9 | 7 | 8.4 |
i高的 | 媽 | 11.8 | 14 | 16.8 |
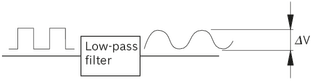
小脈沖寬度為52秒,相當于10千赫的頻率。
為了解釋信號,必須確保在30千赫輸入頻率下,信號(在任何低通濾波器出現后)仍然具有足夠的電壓差(δv)用于評估。
電阻器r產生出現在遙控控制單元頻率輸入端的電壓。
例如r= 200ω時,讀取以下電壓:
U投入 (r= 200ω) | 低限度 | 名義上的 | z高的 | |
U低的 | V | 1.18 | 1.4 | 1.68 |
U高的 | V | 2.36 | 2.8 | 3.36 |
要安裝的電阻器r必須這樣選擇:
控制單元內部信號評估的電壓差足夠了。
‐的
電阻器上的大電壓r不會變得工具高(適用于傳感器電源),因此傳感器引腳處至少存在4.5 V電壓。
‐的
如果滿足這些條件,并且信號存在于控制單元內部,則可以確定傳感器信息。
角速度
由于DSM的特性,即輪齒的兩側,車輪的實際速度差確定如下
f車輪=f閱讀/ 2
速度、臨界氣隙、靜止
為了確定這一信息,必須測量脈沖的長度。例如,這可以在控制單元中通過測量脈沖的開始和結束時間來完成。
然而,在沒有這種評估的情況下,總是可以從頻率中讀取速度。然而,應始終考慮靜止狀態下的行為(每0.7秒1.44毫秒)。可以檢測到脈沖過長(1.44毫秒)。
